PID szabályozó

A PID szabályozó egy lineáris rendszerek szabályozásánál gyakran alkalmazott, párhuzamos kompenzáción alapuló szabályozótípus. A PID rövidítés a szabályozó elvére utal, a szabályozó által kiadott végrehajtójel
- a hibajellel (P: proportional),
- a hibajel integráljával (I: integral), valamint
- a hibajel változási sebességével, deriváltjával (D: derivative)
arányos tagokból adódik össze, azaz a végrehajtójel a jelenlegi hiba, a múltbeli hibák és a várható hibák függvénye. Ezen tagok közül nem mindig valósítják meg mindet, ilyenkor beszélhetünk P, PI, PD szabályozókról. A végrehajtójel használható a folyamat vezérlésére, például egy fűtési rendszer energiaforrásának szabályozására.
Matematikai leírás
A PID szabályozó bemenetét -vel, kimenetét -vel jelölve azt várjuk el a szabályozótól, hogy



alakú kimenetet állítson elő, ahol az arányos tag súlyát, az integráló tag és a differenciáló tag súlyát adja meg.



Mint lineáris rendszer, a PID szabályozó viselkedése is leírható frekvenciatartományban. Átviteli függvénye párhuzamos, az előző képletből a Laplace-transzformáció alapján következő alakban:

Ebben a formában a differenciáló tag valóban a hibajel deriváltjával arányos jelet állítja elő, azonban ebben a tagban a számláló fokszáma nagyobb, mint a nevezőé, vagyis valós rendszerrel nem valósítható meg. Ezért az ideális differenciáló tag helyett egy közelítő D-tagot szokás megvalósítani:

megfelelő megválasztásával a szabályozó kisfrekvenciás jelekre jól közelíti az ideális PID szabályozó tulajdonságait.

A tagok közös nevezőre hozásával és a kifejezés átrendezésével megkaphatjuk a szabályozó átviteli függvényének soros alakját:

A soros alak előnye, hogy rámutat a soros kompenzáció hatására frekvenciatartományban:
Ha a szabályozandó folyamat (szakasz) viselkedésének leírását ismerjük (a rendszer részletes fizikai modellje, vagy a szakaszt identifikálva), a és értékét az identifikált szakasz két legnagyobb időállandójával egyezőnek választva, -t pedig náluk kisebbre választva a rendszer gyorsítható. Az eredő rendszert visszacsatolva pedig az integrátor jelleg (-es tényező) a rendszer statikus hibája megszüntethető.




PID szabályozó elmélete
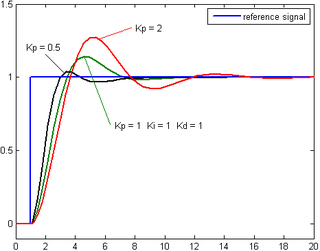
A következőkben leírjuk, hogyan válaszolnak a szabályozó elemei, ha az alapjel[1] egységugrás függvény szerint változik (kék vonal). Az időfüggvények csak a hasonlóságot jelzik – például villamos szabályozó alapjele 4...20 mA értékek közé eshet, míg a szabályozott jellemző akármi lehet (nyomás, hőmérséklet, folyadékszint, stb.)
Arányos rész
Az arányos tag válaszfüggvényét megkapjuk, ha megszorozzuk a hibajelet a Kp konstanssal. Az arányos tagot a következőképpen adhatjuk meg:

ahol:
- : arányos tag kimenete
- : arányos tag átviteli tényezője (erősítés)
- : hibajel
- : Setpoint, alapjel
- : Process value, szabályozott jellemző
- : Pillanatnyi idő







A magas erősítés azt jelenti, hogy a kimenet változása nagy lesz. Az arányos tag arányos a hibajellel. Ha az erősítés túl nagy, instabilitási problémák léphetnek fel, míg ha túl kicsi, akkor kevésbé érzékeny a szabályzó kör.
Integráló rész

Az integráló-tag arányos a hibajel nagyságával, valamint a hibajel időtartamával is. Összegezve a pillanatnyi hibát időről időre (más szóval integrálva a hibajelet) megadja az offset-hibát. Az offset-hibát célszerű korábban kiküszöbölni. Az összegzett hibát az integrátor erősítésével összeszorozva megkapjuk az integráló tag kimenetét. Az integráló tag erősítését a paraméter határozza meg.

Az integráló-tagot a következőképpen adhatjuk meg:

ahol:
- : Integráló-tag kimenete
- : Erősítés, integráló tag átviteli tényezője
- : Setpoint, alapjel
- : Process value, szabályozott jellemző
- : Hibajel
- : Pillanatnyi idő
- : Integrálási idő


Az integráló tag (amennyiben hozzáadjuk az az arányos-taghoz) gyorsítja a folyamat mozgását az alapérték (SP-Setpoint) felé és kiküszöböli a maradó szabályozási eltérést. Mivel az integráló tag a múltbeli összegzett hibajelekkel áll összefüggésben, a jelenben túllendülést produkálhat a kívánt értékhez képest.
Differenciáló-tag

A hiba változásának nagysága a hibajel meredekségéből határozható meg, azaz vesszük az első deriváltját az idő függvényében és megszorozzuk a differenciáló-tag erősítésével (). A konstans megadja az erősítés nagyságát.

A differenciáló-tag a következőképpen adható meg:

ahol:
- : Differenciáló-tag kimenete
- : differenciáló tag átviteli tényezője, erősítés
- : Setpoint, alapjel
- : Process value, szabályozott jellemző
- : Hibajel
- : Pillanatnyi idő

A differenciáló tag késlelteti a szabályozó kimenetének változásának a mértékét. Ezen túl a differenciáló-tag szerepe, hogy csökkentse az integráló-tag túllendülését, valamint fokozza a szabályozási folyamat stabilitását. Azonban a jelek differenciálása erősíti a zajt, ezért ha a zaj és az erősítése ennek a tagnak túl nagy, akkor instabilitási problémák léphetnek fel. A zaj kifejezés helyett a zavaró jellemző is használatos
Kapcsolódó szócikkek
A kifejezések értelmezését lásd a szabályozás szócikkben
Források
- ↑ IEC 60050 - International Electrotechnical Vocabulary - typical elements of an elementary control system. electropedia.org, 2011. (Hozzáférés: 2011. október 3.) az alapjel angolul: reference variable
 Informatikai portál • összefoglaló, színes tartalomajánló lap
Informatikai portál • összefoglaló, színes tartalomajánló lap

 | Ez a technikai tárgyú lap egyelőre csonk (erősen hiányos). Segíts te is, hogy igazi szócikk lehessen belőle! |







