Sík (geometria)

A sík a geometriában, azon belül tipikusan a kétdimenziós síkgeometriában és a háromdimenziós térgeometriában fontos fogalom. Leírása, és nem definíciója szerint végtelenül kiterjedt, kétdimenziós objektum. Ha egy egy sík egy egyenes két pontját tartalmazza, akkor a sík a teljes egyenest tartalmazza.
Konkrétabban a matematika különböző részterületei különböző objektumokat tekintenek síknak.
Definíciója
Euklidész az Elemekben (az egyeneshez hasonlóan) előbb a felületet definiálja: Felület az, aminek csak hosszúsága és szélessége van, és csak ezután határozza meg a síkot: Síkfelület az, amelyik a rajta levő egyenesekhez viszonyítva egyenlően fekszik. Ma már a síkot is alapfogalomnak tekintjük a geometriában, tehát nem definiáljuk.
Jellemzése
Hogy pontosan mit jelent a sík, azt mindenki magának határozza meg (a mindennapi tapasztalataival összhangban). Geometriai szempontból a sík legfontosabb tulajdonságai:
- Kétdimenziós objektum,[1] azaz két, egymástól különböző irányban végtelen, a harmadik irányban 0 a kiterjedése.
- Három nem kollineáris[2] pont egyértelműen meghatározza, azaz ha két síknak létezik három nem kollineáris közös pontja, akkor az összes pontjuk közös.
- Ha két síknak létezik egy közös pontja, akkor létezik olyan egyenes, ami mindkét síkra illeszkedik.
Önálló objektum


Klasszikus síkfogalom
A klasszikus geometriában az (euklideszi) sík geometriai vizsgálatok tárgya, például abból a szempontból, hogy milyen alakzatok szerkeszthetők meg körzővel és vonalzóval. A sík (ebben az összefüggésben határozott névelővel, mint ami nincs magasabb dimenzióba ágyazva) a rajzlap absztrakciója, ami végtelenül lapos és végtelenül kiterjedt; ahogy az egyenes a ceruzával vagy más eszközzel meghúzott vonal végtelenül vékony és végtelenül hosszú absztrakciója. A modern geometriát a Hilbert-féle axiómarendszer írja le.
Descartes óta a sík azonosítható a valós számok rendezett párosaival, -tel. Más szóval, a Hilbert-féle geometria modellje. Ezt a valós vektorteret is nevezik síknak.

Projektív sík
A projektív sík megkapható úgy, hogy egyeneseinek párhuzamos nyalábjaihoz hozzáveszünk egy-egy végtelen távoli pontot, és ezek halmazát a sík végtelen távoli egyenesének tekintjük.
Az így kapott projektív sík is leírható algebrailag: homogén valós számhármasokat veszünk. Itt a homogén szó azt jelenti, hogy ha egy számhármas minden tagját ugyanazzal a nullától különböző valós számmal szorozzuk, akkor az új hármas ugyanazt a pontot adja meg, mint a régi. Ugyanezek a hármasok írják le egydimenziós altereit; azaz a projektív sík pontjai azonosíthatók a háromdimenziós tér origóján átmenő egyeneseivel. A projektív sík egyenesei hasonlóan azonosíthatók a háromdimenziós tér origóján átmenő síkjaival.

Általánosítások
Ha gyengítjük a Hilbert-féle axiómákat, például lehetővé tesszük a végességet, akkor véges struktúrákhoz jutunk, melyeket affin vagy projektív síkoknak nevezünk. A legkisebb projektív sík hét pontot és hét egyenest tartalmaz. Tetszőleges egyenes és annak pontjainak eltávolításával affin síkhoz jutunk, négy ponttal és hat egyenessel.
A Descartes-féle modell általánosításában ahelyett, hogy a valós számokkal koordinátáznánk a síkot, egy tetszőleges Értelmezés sikertelen (SVG (a MathML egy böngészőkiegészítővel engedélyezhető): Érvénytelen válasz („Math extension cannot connect to Restbase.”) a(z) http://localhost:6011/hu.wikipedia.org/v1/ szervertől:): {\displaystyle K} testet használunk. Így jutunk a kétdimenziós vektorterekhez, melyek affin síkokat írnak le. A affin terek segítségével pedig projektív síkok írhatók le. Azonban belátható, hogy nem minden projektív sík írható le ezzel a módszerrel.


Ha , akkor meg kell jegyeznünk, hogy a komplex számok valós értelemben már maguk kétdimenziós teret alkotnak. Így a komplex egyenes kétdimenziós, a komplex sík négydimenziós, azonban csak kétdimenziós komplex vektortér. Ha véges, akkor véges síkokhoz jutunk. Ha például , akkor a fent leírt legkisebb projektív, illetve affin síkokhoz jutunk.



Topológiai értelemben a sík csak esetén felület. A esetben komplex felület.

Sík megadása az analitikus geometriában



Egy sík egyenlete egy olyan egyenlet, melyet a sík minden pontja teljesít, és ha egy pont teljesíti, akkor rajta van a síkon. Az egyenlet különböző alakokat ölthet, attól függően, hogy mely adatokból számították ki.
Legyen a sík egy pontja és egy normálvektor.[3] Ekkor a sík egyenlete:



ahol a d konstans a következőképpen adódik:

A sík egyenlete a skaláris szorzat fogalmát felhasználva is megfogalmazható:

A tengelymetszeti egyenlet alakja:

ahol , és a sík koordinátategelyekkel vett metszéspontjai. Ha a sík párhuzamos valamelyik tengellyel, akkor az egyenletben nem szerepel az annak megfelelő koordinátát tartalmazó term.



A sík paraméteres egyenlete:


alakú, ahol támaszvektor, és irányvektorok. A pont a sík tetszőleges pontja, és párhuzamosak a síkkal úgy, hogy nem konstansszorosai egymásnak. Az irányvektorok affin koordináta-rendszert feszítenek ki, amiben a sík pontjainak koordinátái.




A sík hárompontos egyenlete

alakú, ahol , és a sík egymástól különböző pontjai, melyek nincsenek egy egyenesen.


A sík normálegyenlete

alakú, ahol a sík támaszvektora, és normálvektor. A skaláris szorzat pontosan akkor nulla, ha a normálvektor merőleges a sík pontjának, mint normálvektornak és a támaszpont, mint helyvektornak különbségére. A sík feszítő vektoraira teljesül, hogy .


A sík Hesse-féle normálegyenlete

alakú, ahol egységnyi hosszú, a sík irányába mutató normálvektor, és a sík távolsága az origótól.


Magasabb dimenziós terekben a sík lineáris 2-sokaság az -dimenziós térben. A fenti implicit alakban adott egyenletek ezekben a terekben hipersíkokat írnak le. A síkok egyenletrendszere egyenletből álló egyenletrendszerrel írható le, mivel ennyi hipersík metszetéből áll elő. Ezeknek a hipersíkoknak egymástól független normálvektorai kellenek, hogy legyenek.



Metszéspontok háromdimenziós térben
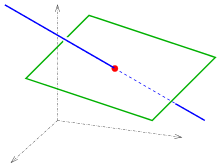
Egyenes és sík metszete
A térben az egyeneseket rendszerint paraméterábrázolással, a síkokat egyenlettel írják le. Behelyettesítve az egyenes paraméteres ábrázolását a sík egyenletébe adódik az


lineáris egyenlet a metszéspont paraméterére. Ha az egyenletnek nincs megoldása, akkor az egyenes párhuzamos a síkkal. Ha az egyenletnek minden megoldása, akkor az egyenes a síkban van.[4]


Három sík metszéspontja
Ha az egyenes két sík metszeteként van megadva, és keressük a metszéspontját egy síkkal, akkor három sík metszéspontját kell meghatározni.
Legyenek a síkok ! Ha normálvektoraik lineárisan függetlenek, akkor a metszéspont



A bizonyításhoz vegyük figyelembe, hogy és a skaláris szorzásra vonatkozó szabályokat.[4]

Pont és sík távolsága
A pont és az egyenletű sík távolsága:



Ha a sík adott a , , pontokkal, akkor a távolság számítható a




képlettel, ahol jelöli a vektoriális szorzatot, a skaláris szorzatot, és egy vektor hosszát. Alternatív módszerként el lehet végezni az







helyettesítést.[5]
Jegyzetek
- ↑ Az n-dimenziós geometriában a hasonlóan fontos objektumok az (n–1)-dimenziós hipersíkok. Ezekre lényegében minden az itt leírt tulajdonságokkal analóg módon levezethető. Lásd: a hipersík két dimenzióban a hagyományos egyenes → egyenlete alakú!
- ↑ Nem egy egyenesre illeszkedő.
- ↑ Olyan vektor, ami merőleges a síkra. Gyakran felteszik, hogy a normálvektor egység hosszú, azaz . Ez elsősorban kényelmi szempont, mert ekkor sok számítás leegyszerűsödik.
- ↑ a b CDKG: Computerunterstützte Darstellende und Konstruktive Geometrie (TU Darmstadt)
- ↑ Wolfram MathWorld: Point-Plane Distance


Források
- Steffen Goebbels, Stefan Ritter. Mathematik verstehen und anwenden. Springer (2011)
- Lothar Papula. Mathematische Formelsammlung: Für Ingenieure und Naturwissenschaftler. Springer (2009)
- Thomas Westermann. Mathematik für Ingenieure. Springer (2008)
Fordítás
Ez a szócikk részben vagy egészben az Ebene (Mathematik) című német Wikipédia-szócikk fordításán alapul. Az eredeti cikk szerkesztőit annak laptörténete sorolja fel. Ez a jelzés csupán a megfogalmazás eredetét és a szerzői jogokat jelzi, nem szolgál a cikkben szereplő információk forrásmegjelöléseként.
Ez a szócikk részben vagy egészben az Ebenengleichung című német Wikipédia-szócikk fordításán alapul. Az eredeti cikk szerkesztőit annak laptörténete sorolja fel. Ez a jelzés csupán a megfogalmazás eredetét és a szerzői jogokat jelzi, nem szolgál a cikkben szereplő információk forrásmegjelöléseként.







