In cinematica il moto parabolico è un tipo di moto bidimensionale esprimibile attraverso la combinazione di due moti rettilinei simultanei ed indipendenti:
moto rettilineo uniforme
moto rettilineo uniformemente accelerato.
Il moto parabolico può essere descritto mediante le relazioni della cinematica che legano i vettori posizione, velocità, ed accelerazione. La più significativa realizzazione di tale moto è fornita dal moto del proiettile in cui si utilizzano le seguenti semplificazioni (approssimazioni della fisica e della geometria del problema):
tutta la massa e la geometria del corpo sono concentrate in un unico punto;
l'accelerazione del moto è verticale; il suo modulo è pari all'accelerazione di gravità sulla crosta terrestre: g = 9.81 m/s2. Dunque, il corpo si trova in un campo di gravità uniforme ed indipendente dal tempo;
le eventuali forme di attriti legate alla resistenza dell'aria sono trascurabili.
Indice
1Analisi del moto parabolico: traiettoria
2Gittata
3Altezza massima
4Tempo di volo
5Dinamica del moto del proiettile
6Moto parabolico con attrito viscoso
7Altri progetti
8Collegamenti esterni
Analisi del moto parabolico: traiettoria
Moto parabolico di un pallone da basketTraiettoria balistica parabolica
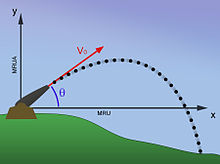
Si supponga che un corpo sia lanciato all'istante t=0 nell'origine O di un sistema di coordinate cartesianoOxy, e che la velocità iniziale abbia modulo v0 e formi un angolo θ con l'asse x orizzontale.
Traiettoria parabolica del punto
Dalle leggi del moto uniformemente accelerato si ha:
Ipotizzando che il corpo si trovi in prossimità della terra, è possibile considerare la funzione come costante, con valore pari a diretta lungo la perpendicolare al terreno (asse y), per cui si ha:
Come si può notare dalla formula, la velocità giace sempre nel piano formato dai vettori costanti e , ovvero quello su cui si svolge il moto.
Il vettore velocità può essere scomposto lungo le due componenti x e y:
Dalla relazione precedente, si ricava:
Proiettando le velocità sugli assi si ottengono le componenti:
costante nel tempo, e
,
da cui, integrando, si ricavano le leggi orarie dei moti lungo gli assi x e y:
La traiettoria viene ricavata eliminando la variabile temporale, ossia, esprimendo il rapporto:
e esplicitando il parametro dalla legge oraria :
In tal modo si arriva all'equazione cartesiana:
da cui, moltiplicando per x ambo i membri, si ottiene
che rappresenta una parabola con concavità rivolta verso il basso, il cui grafico è rappresentato in figura. Inoltre se la posizione del lancio del corpo non si trova nell'origine, quindi ad esempio nel punto si può approssimare la curva con una traslazione degli assi paralleli agli assi cartesiani con origine in (l'approssimazione è dovuta al fatto che stiamo considerando il corpo in prossimità della terra, ergo g è costante)
Gittata
La gittata è la distanza percorsa in orizzontale dal corpo prima che tocchi terra. Se consideriamo la traiettoria espressa in un piano cartesiano Oxy, per calcolare la gittata possiamo utilizzare la funzione y(x) vista sopra. Ci interessa sapere a che coordinata x si ha la coordinata y pari a zero, cioè:
Si tratta di una parabola, ci aspettiamo quindi due soluzioni. Se il corpo parte da terra una delle due soluzioni sarà proprio la posizione di partenza e può essere scartata. Se il corpo non parte da terra, una delle due soluzioni si troverà "dietro" la posizione di partenza e non ha significato fisico. Svolgiamo l'equazione di secondo grado per ottenere la gittata xG
Studiamo ora il caso in cui l'altezza di partenza non è zero. Non ci servirà altro che riutilizzare la funzione y(x) aggiungendo la costante . Svolgiamo quest'altra equazione di secondo grado per ottenere:
Sono necessarie varie semplificazioni e trasformazioni, ma in questa forma è facile notare come questo risultato vale sia per un corpo lanciato da terra che per un corpo lanciato da un'altezza data.
A questo punto è possibile ricavare l'angolo di massima gittata. Fissati per un punto lanciato da terra, ci si chiede per quale angolo la gittata è massima. ha massimo relativo per l'argomento del seno uguale a quindi per °
Altezza massima
Siccome il moto parabolico è simmetrico rispetto all'asse passante per il vertice e parallelo all'asse y (proprietà della parabola), l'ascissa del punto di atterraggio è due volte l'ascissa del vertice della parabola, ovvero il doppio dell'ascissa del punto di massima altezza. Tale ascissa è dunque:
Sostituendo nell'equazione della parabola esplicitata precedentemente si ha che:
Gli stessi risultati si ottengono considerando il fatto che il punto di altezza massima è un punto di massimo della curva della traiettoria e quindi il punto di massimo della parabola. Trovarlo quindi consiste nel porre la derivata prima dell'equazione della traiettoria uguale a zero e ricavare dall'equazione ottenuta l'ascissa del punto cercato (Che sarebbe la gittata) sostituendo nell'equazione della traiettoria si ottiene anche l'ordinata .
Tempo di volo
Il tempo di volo è il tempo fra l'istante di lancio e quello di arrivo del corpo, che coincide con il tempo necessario a percorrere il tratto OG con la velocità vx:
Dinamica del moto del proiettile
Apparecchio per dimostrare la traiettoria parabolica dei proiettili (fine XVIII secolo, Museo Galileo di Firenze).
Un tipico esempio di moto parabolico è quello del proiettile, di cui si occupa la balistica. Un proiettile in volo è sottoposto alla forza di gravità della Terra. Nell'ipotesi di attrito dell'aria trascurabile, il secondo principio della dinamica porta ad un'accelerazione che può essere scomposta nel seguente modo:
Se il proiettile viene sparato con velocità iniziale v0 secondo un angolo θ, si ottengono le seguenti componenti di velocità:
Le componenti della posizione del proiettile sono quindi:
Il moto lungo l'asse x è quindi uniforme, e quello lungo l'asse y accelerato. Se la velocità iniziale fosse stata pari a zero, il moto sarebbe stato di caduta libera.
Dove è la Legge di Stokes generalizzata per gli sferoidi, dove
sono le dimensioni degli assi principali.
Considerando la legge di Stokes (in quanto il proiettile è generalmente uno sferoide prolato), l'equazione iniziale diventa:
Con volume del corpo .
quindi l'equazione diventa:
Adesso scomponendo le accelerazioni lungo gli assi, si ottiene:
Quindi si riscrive l'accelerazione come , ottenendo:
si isola v:
dove e
quindi si ha:
risolvendo quindi l'equazione differenziale: si ottiene: il cui risultato è:
che può essere resa come:
Siccome nella componente del moto non c'è accelerazione, si avrà che risulta:
;
mentre il moto lungo l'asse delle ha la caratteristica di presentare l'accelerazione; si ha dunque: con a diverso da 0;
Adesso per trovare le equazioni cartesiane del moto parabolico si vanno ad integrare le equazioni cartesiane delle velocità:
la cui soluzione è:
la cui soluzione è:
L'equazione cartesiana della parabola è quindi:
Se si vuole essere ancora più precisi nella traiettoria si può considerare la forza di attrito come quindi scrivendo sempre l'equazione iniziale:
che diventa:
Si scompone il moto lungo gli assi:
Si riscrive l'accelerazione come () ottenendo:
si isola la v al quadrato:
dove e
quindi si ha:
risolvendo quindi la prima equazione differenziale: si ottiene: che porta come risultato: dove la costante c per t=0 diventa: quindi l'equazione differenziale finale diventa: dove mettendo in evidenza la v e proiettando il moto lungo l'asse delle x si ottiene l'equazione cartesiana della velocità:
ed integrando questa equazione si ottiene:
risolvendo invece la seconda equazione differenziale: si ottiene: che porta come risultato: dove la costante c per t=0 diventa: quindi l'equazione differenziale finale diventa: dove mettendo in evidenza la v e proiettando il moto lungo l'asse delle x si ottiene l'equazione cartesiana della velocità:
ed integrando questa equazione si ottiene:
Quindi l'equazione cartesiana della parabola è:
Altri progetti
Altri progetti
Wikimedia Commons
Wikimedia Commons contiene immagini o altri file su Moto parabolico
Collegamenti esterni
Java applet of projectile motion, su phy.hk.
Portale Meccanica: accedi alle voci di Wikipedia che trattano di meccanica











































![{\displaystyle {\mathbf {Fr}}=-6\pi \eta {\sqrt[{3}]{abc}}{\mathbf {v}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/265f51a0e41af3f99dfbc3030cec7b43034eb031)

![{\displaystyle -V\rho {\mathbf {g}}+m{\mathbf {g}}-6\pi \eta {\sqrt[{3}]{abc}}{\mathbf {v}}=m{\mathbf {a}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b44c22b646b48c31831df8e010f2b5c8e3538065)

![{\displaystyle {\mathbf {g}}\left(m-{\dfrac {4}{3}}\pi \rho abc\right)-6\pi \eta {\sqrt[{3}]{abc}}{\mathbf {v}}=m{\dfrac {d{\mathbf {v}}}{dt}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a1410a2069bb12309e8ad814a8b1958eecb1435a)
![{\displaystyle {\begin{cases}-6\pi \eta {\sqrt[{3}]{abc}}v_{x}=ma_{x}\\{\displaystyle g\left({\dfrac {4}{3}}\pi \rho abc-m\right)-6\pi \eta {\sqrt[{3}]{abc}}v_{y}=ma_{y}}\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/44ba3fba40f3b7d066d60f554e04ed237e33338e)

![{\displaystyle {\begin{cases}-6\pi \eta {\sqrt[{3}]{abc}}v_{x}=m{\dfrac {dv_{x}}{dt}}\\{\displaystyle -g\left({\dfrac {4}{3}}\pi \rho abc-m\right)+6\pi \eta {\sqrt[{3}]{abc}}v_{y}=-m{\dfrac {dv_{y}}{dt}}}\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f0f42d7a22947fc548fcb5835c3df2d146cd3f68)
![{\displaystyle {\begin{cases}v_{x}=-{\dfrac {m}{6\pi \eta {\sqrt[{3}]{abc}}}}{\dfrac {dv_{x}}{dt}}\\{\displaystyle {\dfrac {g\left(m-{\dfrac {4}{3}}\pi \rho abc\right)}{6\pi \eta {\sqrt[{3}]{abc}}}}+v_{y}=-{\dfrac {m}{6\pi \eta {\sqrt[{3}]{abc}}}}{\dfrac {dv_{y}}{dt}}}\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/15ff707c5cc25e83bc868abadf9fb830439ce2fd)
![{\displaystyle A={\dfrac {g\left(m-{\dfrac {4}{3}}\pi \rho abc\right)}{6\pi \eta {\sqrt[{3}]{abc}}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d29f65423a50d4c2630af0e3e030fd4f58d3ed7)
![{\displaystyle B={\dfrac {m}{6\pi \eta {\sqrt[{3}]{abc}}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cd43485e67381519bc3c8514ef82e94d9ab57b2b)






![{\displaystyle v_{x}=v_{0x}\exp \left({-{\dfrac {t}{B}}}\right)=v_{0x}\exp \left[{-{\dfrac {6\pi \eta {\sqrt[{3}]{abc}}t}{m}}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1efd4eb37ec917d128fb061ae13ade0f76e6858b)

![{\displaystyle v_{y}=\left({\dfrac {g\left(m-{\dfrac {4}{3}}\pi \rho abc\right)}{6\pi \eta {\sqrt[{3}]{abc}}}}+v_{0y}\right)\exp \left[{-{\dfrac {6\pi \eta {\sqrt[{3}]{abc}}t}{m}}}-{\dfrac {g(m-{\dfrac {4}{3}}\pi \rho abc)}{6\pi \eta {\sqrt[{3}]{abc}}}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/94c61015511f702230d0d0427c880dd0a2aac53a)

![{\displaystyle x(t)=bv_{0x}(1-e^{-{\dfrac {t}{b}}})={\dfrac {m}{6\pi \eta {\sqrt[{3}]{abc}}}}v_{0x}(1-e^{-{\dfrac {6\pi \eta {\sqrt[{3}]{abc}}t}{m}}})}](https://wikimedia.org/api/rest_v1/media/math/render/svg/31332849e20689807c9ef5008ab5e972bc896bee)

![{\displaystyle y(t)=b(a+v_{0y})(1-e^{-{\dfrac {t}{b}}})-at={\dfrac {m}{6\pi \eta {\sqrt[{3}]{abc}}}}({\dfrac {g(m-{\dfrac {4}{3}}\pi \rho abc)}{6\pi \eta {\sqrt[{3}]{abc}}}}+v_{0y})(1-e^{-{\dfrac {6\pi \eta {\sqrt[{3}]{abc}}t}{m}}})-{\dfrac {g(m-{\dfrac {4}{3}}\pi \rho abc)}{6\pi \eta {\sqrt[{3}]{abc}}}}t}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50a3eb0c0a52851def36a856e1f6b34dc8269045)

![{\displaystyle Fr=k|v|v=6\pi \eta {\sqrt[{3}]{abc}}v^{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/077d1b5aab6fad5a46435a6f6824c84848b57072)

![{\displaystyle V\rho g-mg-6\pi \eta {\sqrt[{3}]{abc}}v^{2}=ma}](https://wikimedia.org/api/rest_v1/media/math/render/svg/99ad6bd5b9c7194c91d5b6a10127ae47a34ad603)
![{\displaystyle {\begin{cases}-6\pi \eta {\sqrt[{3}]{abc}}v_{x}^{2}=ma_{x}\\{\displaystyle g({\dfrac {4}{3}}\pi \rho abc-m)-6\pi \eta {\sqrt[{3}]{abc}}v_{y}^{2}=ma_{y}}\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f0bdcd98bc049dee0955ef9ab5055cc5b430ac3b)

![{\displaystyle {\begin{cases}6\pi \eta {\sqrt[{3}]{abc}}v_{x}^{2}=-m{\dfrac {dv_{x}}{dt}}\\{\displaystyle -g({\dfrac {4}{3}}\pi \rho abc-m)+6\pi \eta {\sqrt[{3}]{abc}}v_{y}^{2}=-m{\dfrac {dv_{y}}{dt}}}\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/452461642f367a3a376f0fed28196e07bc0828c4)
![{\displaystyle {\begin{cases}v_{x}^{2}=-{\dfrac {m}{6\pi \eta {\sqrt[{3}]{abc}}}}{\dfrac {dv_{x}}{dt}}\\{\displaystyle {\dfrac {g(m-{\dfrac {4}{3}}\pi \rho abc)}{6\pi \eta {\sqrt[{3}]{abc}}}}+v_{y}^{2}=-{\dfrac {m}{6\pi \eta {\sqrt[{3}]{abc}}}}{\dfrac {dv_{y}}{dt}}}\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/73ca51d292cbb8aac1af7494131f3d93fbcdf1d6)
![{\displaystyle a={\dfrac {g(m-{\dfrac {4}{3}}\pi \rho abc)}{6\pi \eta {\sqrt[{3}]{abc}}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/11943a7efbe71852b7c982ee9e4441de9c04cd9f)
![{\displaystyle b={\dfrac {m}{6\pi \eta {\sqrt[{3}]{abc}}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9cbd2f79e6ebb5ad5e71a0f38eb96466c112e26f)














![{\displaystyle y(t)=y_{0}+b[ln(|cos({\dfrac {{\sqrt {a}}t}{b}}-arctg({\dfrac {v_{0y}}{\sqrt {a}}}))|)-ln(|cos(-arctg({\dfrac {v_{0y}}{\sqrt {a}}}))|)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/942d0ec5005220771f35a7f40a0ef1b0f0d61fa5)
![{\displaystyle y(x)=y_{0}+b[ln(|cos({\dfrac {{\sqrt {a}}(e^{\dfrac {x}{b}}-1)}{v_{0x}}}-arctg({\dfrac {v_{0y}}{\sqrt {a}}}))|)-ln(|cos(-arctg({\dfrac {v_{0y}}{\sqrt {a}}}))|)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3ee8562cf004674ccc47bb49a066f7007983dc0)
 Wikimedia Commons contiene immagini o altri file su Moto parabolico
Wikimedia Commons contiene immagini o altri file su Moto parabolico Portale Meccanica: accedi alle voci di Wikipedia che trattano di meccanica
Portale Meccanica: accedi alle voci di Wikipedia che trattano di meccanica









