Spazio tangente

Lo spazio tangente di una varietà è un ente che consente la generalizzazione del concetto di piano tangente ad una superficie e l'estensione della definizione di vettore dagli spazi affini ad una qualunque varietà.
Intuitivamente, il concetto di spazio tangente si presenta in topologia differenziale come lo spazio formato da tutte le possibili direzioni delle curve che passano attraverso un punto di una varietà differenziabile. La dimensione dello spazio tangente è uguale a quella della varietà considerata.
La definizione di spazio tangente può essere generalizzata anche a strutture come le varietà algebriche, dove la dimensione dello spazio tangente è almeno pari a quella della varietà. I punti in cui le due dimensioni coincidono sono detti non singolari, gli altri singolari. Ad esempio, una curva intrecciata possiede più di una tangente nei suoi nodi.
Gli spazi tangenti di una varietà possono essere "incollati" insieme per formare il fibrato tangente, una nuova varietà di dimensione doppia rispetto alla varietà originale.
Definizione
Esistono numerose definizioni equivalenti per lo spazio tangente di una varietà, che partono da quelle più intuitive e vicine al concetto di piano tangente ad una superficie, per arrivare a quelle più astratte, che presentano maggiore generalità.
Varietà immerse
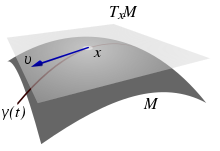
Sia una varietà differenziabile contenuta in uno spazio euclideo . Lo spazio tangente ad un punto è lo spazio formato dai vettori tangenti a tutte le curve in passanti per . Più formalmente, è lo spazio formato da tutti i vettori




al variare di fra le curve differenziabili


definite per qualche , aventi immagine in e con . Qui indica la tangente di , ovvero il vettore delle sue derivate.



Lo spazio tangente a viene solitamente indicato con

Definizione tramite direzioni delle curve
La definizione appena data può essere estesa in modo opportuno ad una varietà differenziabile astratta, definita cioè in modo più intrinseco come spazio topologico dotato di carte in e funzioni di transizione differenziabili, di classe con .


Sia un punto della varietà e

una carta definita in un aperto che contiene .

Siano

due curve differenziabili, cioè tali che e siano derivabili in 0. Le curve e sono dette tangenti in 0 se coincidono in 0 e coincidono anche le loro derivate attraverso la carta :






La tangenza tra curve è una relazione di equivalenza; le classi di equivalenza sono chiamate vettori tangenti della varietà nel punto e vengono scritte come . L'insieme di tutti i vettori tangenti non dipende dalla carta ed è chiamato spazio tangente a nel punto .
Ciascun vettore tangente rappresenta la direzione di una curva passante per .
Definizione tramite derivazioni
Sia una varietà differenziabile. L'insieme delle funzioni infinitamente differenziabili su è definito da

e possiede una struttura di algebra associativa reale, con somma e prodotto di funzioni definiti come segue:

Scelto un punto in , una derivazione in è una funzione lineare

tale che per ogni in valga la relazione (analoga della regola di Leibnitz)



L'insieme delle derivazioni è uno spazio vettoriale chiamato spazio tangente e indicato con .

La relazione fra questa definizione e la precedente è la seguente: una curva di vettore tangente individua la derivazione

D'altra parte, ogni derivazione è individuata da una curva opportuna.
Definizione tramite spazio cotangente
Sia una varietà e un punto di . Le funzioni in che si annullano in costituiscono un ideale dell'anello .



Gli ideali e sono inoltre spazi vettoriali, e il loro quoziente è lo spazio cotangente di in . Il duale di questo spazio è definito come spazio tangente di in .



Questa definizione più astratta può facilmente essere estesa a strutture quali le varietà algebriche. La relazione con la precedente definizione è la seguente: data una derivazione e una funzione in , dalla regola del prodotto si ricava facilmente[1] . Segue allora che genera in maniera naturale una funzione lineare da in .




Viceversa, una funzione lineare

determina la derivazione

Derivata di una mappa
Una applicazione differenziabile (detta anche mappa) tra varietà induce una applicazione lineare tra i corrispondenti spazi tangenti:


dove la prima definizione è valida per spazi tangenti definiti tramite direzione delle curve, la seconda per spazi tangenti definiti tramite derivazioni.
La mappa (scritta anche come , , , ) è detta differenziale o mappa tangente[2] di in , e rappresenta la miglior approssimazione lineare di nei dintorni di . Nelle coordinate locali determinate da una carta, la derivata di si può rappresentare con il suo jacobiano. Se , la definizione data coincide con quella usuale di differenziale.








Vale inoltre il seguente teorema, che è un'estensione del teorema della funzione inversa tra varietà: se è un diffeomorfismo locale di varietà nel punto di , allora il differenziale è un isomorfismo tra i corrispondenti spazi tangenti. Viceversa, se è un isomorfismo, esiste un intorno aperto di che viene mappato diffeomorficamente da su .


Applicazioni degli spazi tangenti
L'introduzione degli spazi tangenti consente di definire molte altre strutture sulla varietà; ad esempio è possibile definire campi vettoriali, che rappresentano l'astrazione dei campi di velocità di particelle in movimento sulla varietà. Tramite i campi vettoriali è possibile associare un vettore ad ogni punto della varietà, permettendo ad esempio la definizione di equazioni differenziali sulla varietà, le cui soluzioni sono curve differenziabili la cui derivata è punto per punto uguale al vettore facente parte del campo vettoriale.
Vettori tangenti come derivate direzionali
Dato un vettore in , la derivata direzionale di una mappa è:


La mappa sopra definita è una derivazione; inoltre, si può dimostrare che ogni derivazione di può essere messa in questa forma, per cui esiste una corrispondenza biunivoca tra derivazioni e vettori, intesi come vettori tangenti in un punto.

È possibile estendere questa corrispondenza anche ad una varietà qualsiasi: se è un vettore tangente ad una varietà nel suo punto , possiamo definire la derivata direzionale nella direzione data da come
- ,

dove e è la direzione della curva .


Note
- ^ Dimostrazione: poiché è in , con e dalla regola del prodotto si ricava .
- ^ I. Kolář, P. Michor, J. Slovák, p. 8.



Bibliografia
- M. Abate, F. Tovena, Geometria Differenziale, Springer, 2011, ISBN 978-88-470-1919-5.
- G. Gentili, F. Podestà, E. Vesentini, Lezioni di Geometria Differenziale, Torino, Bollati Boringhieri, 1995, ISBN 978-88-339-5556-8.
- Edoardo Sernesi, Geometria 2, Torino, Bollati Boringhieri, 1994, ISBN 978-88-339-5548-3.
- (EN) I. Kolář, P. Michor, J. Slovák, Natural operators in differential geometry (PDF), Springer-Verlag, 1993. URL consultato il 5 luglio 2013 (archiviato dall'url originale il 30 marzo 2017).
Voci correlate
- Varietà differenziabile
- Varietà algebrica
- Tangente (geometria)
Altri progetti
Altri progetti
- Wikimedia Commons
 Wikimedia Commons contiene immagini o altri file sullo spazio tangente
Wikimedia Commons contiene immagini o altri file sullo spazio tangente
Collegamenti esterni
- (EN) Definizione ed esempi di spazio tangente, su people.hofstra.edu. URL consultato il 29 novembre 2006 (archiviato dall'url originale il 7 maggio 2006).
| Controllo di autorità | Thesaurus BNCF 56148 |
|---|
 Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica
Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica









