Integral de Riemann
No ramo da matemática conhecido como análise real, a integral de Riemann, criada por Bernhard Riemann, foi a primeira definição rigorosa de uma integral de uma função em um intervalo. Embora a integral de Riemann seja inadequada para muitos propósitos teóricos, é uma das definições mais simples de integral. Algumas deficiências desta técnica podem ser contornadas pela integral de Riemann-Stieltjes, e a maioria delas desaparece na integral de Lebesgue.
Visão geral
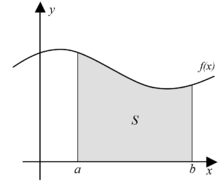
Seja uma função não negativa válida para os números reais do intervalo , e seja uma região do plano sob a função e acima do intervalo (ver a figura 1). O interesse é medir a área de . Uma vez realizada esta medição, esta é denotada por:

![{\displaystyle [a,b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)



A ideia básica de integral de Riemann é muito simples de usar e não deixa ambiguidade para a área de . Para uma aproximação cada vez melhor, é dito que "no limite" é obtida exatamente a área de sob a curva.
Onde pode ser positivo e negativo, a integral corresponde à "área com sinal"; isto é, a área acima do eixo é positiva e a área abaixo do eixo é negativa.



Definição da integral de Riemann
Partições de um intervalo
Uma partição de um intervalo é uma sequência finita . Cada é denominado como um sub-intervalo da partição. A malha de uma partição é definida como o comprimento do mais longo sub-intervalo , isto é, aquele em que onde . Isto também é conhecido como norma de partição.

![{\displaystyle [x_{i},x_{i+1}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7138606cdb8eb7dddaba59b5aefe1ade6bc05a1b)


Uma partição de um intervalo etiquetado é uma partição de um intervalo juntamente com uma sequência finita de números sujeito à condição de que para cada , . Em outras palavras, isto é uma partição juntamente com um ponto distinto para cada sub intervalo. A malha de uma etiqueta é definida da mesma forma que para uma partição ordinária.



Supondo que juntamente com são uma partição etiquetada de , e que juntamente com seja uma outra partição etiquetada de . Podemos dizer que e juntas são um refinamento da juntamente com se para cada inteiro com , exista um inteiro tal que e tal que para algum com . Falando de uma maneira mais simples, um refinamento de uma partição de etiqueta pega uma partição inicial e adiciona mais etiquetas, mas isto não chega a lugar algum.









Podemos definir uma ordem parcial um subconjunto de todas as etiquetas de partição significando que uma etiqueta de partição é maior do que outra se a maior é um refinamento da menor.
Soma de Riemann
Escolha uma função válida para números reais a qual se encontra definida no intervalo . A Soma de Riemann de com respeito a partição denominada com é:

Cada termo na soma é o produto do valor da função em um ponto dado e o comprimento do intervalo. Consequentemente, cada termo representa área de um retângulo com a altura e o comprimento . A soma de Riemann é a área sinalizada de todos os retângulos.


A integral de Riemann
Grosseiramente falando, a integral de Riemann é o limite da soma de Riemann com uma função de partição que se afine cada vez mais. Contudo, o significado preciso acerca do que significa "cada vez mais fino" é o mais importante.
Um fato importante é que a malha de partição deve ser tornar menor e menor, até que seu limite atinja zero. Se isto não for assim, então não poderemos ter uma boa aproximação para esta função em certos intervalos. De fato, isto é suficientemente bom para definir uma integral. Para ser especifico, nós dizemos que a integral Riemann de se igualara a se as seguintes condições foram consideradas:
- Para todo , onde exista tal que para qualquer partição etiquetada e onde a malha seja menor que , nós temos:




Contudo, existe um problema desagradável com esta definição: ela é muito difícil para se trabalhar. Então faremos uma definição alternativa para a integral de Riemann a qual seja mais fácil para se trabalhar, então se prova que esta é a mesma definição que a original. Nossa nova definição diz que a integral de Riemann de é igual a se as seguintes condições foram consideradas:

- Para todo , existe uma partição etiquetada e tal que para qualquer refinamento e de e , nós teremos

Ambos eventualmente significam, a soma de Riemann de com respeito para qualquer partição que seja selecionada que leve a se aproximar de . Desde que isto seja verdade, não importa a proximidade que necessitamos que esta soma ira assumir, nós diremos que a soma Riemann convergira para . Esta definição é sempre um caso especial de um conceito mais geral, uma rede.
Como nos estabelecemos antes, estas duas definições são equivalentes. Em outras palavras, funciona na sua primeira definição se e somente se funciona na sua segunda definição. Para mostrar que a primeira definição implica a segunda, iniciamos com um , e escolhemos um que satisfaça a condição. Escolha qualquer partição etiquetada onde a malha é menor que . Esta soma Riemann é em dentro de , e qualquer refinamento desta partição ira também ter uma grade menor que , então a soma de Riemann dos refinamentos ira também estar em de . Para mostrar que a segunda definição implica a primeira, isto é facilitado com uso da integral de Darboux. Primeiro mostraremos que a segunda é equivalente a definição da integral de Darboux, para isto veja a integral. Agora nós iremos mostrar que a função de integração de Darboux satisfaz a primeira definição. Escolha a partição tal que o limite inferior e superior da soma de Darboux com respeito a esta partição esteja em dentro do valor da integral de Darboux. Seja igual , onde e são o supremum e infimum, respectivamente, de em , e sendo menor que e . Então não é difícil de mostrar que a soma de Riemann de com respeito de qualquer partição etiquetada da grade menor que ira estar em dentro de da maior ou menor soma de Darboux, então isto estará em dentro de de .








Referências
- Shilov, G. E. e Gurevich, B. L., 1978. Integral, Measure, and Derivative: A Unified Approach, Richard A. Silverman, trans. Dover Publications. ISBN 0-486-63519-8.
Ver também
- Primitiva
- Integral de Riemann-Stieltjes
- Integral de Henstock–Kurzweil
- Integral de Lebesgue
- Integral de Darboux








