Kinematski par
Kinematski par obrazuju dva međusobno povezana tela čija su kretanja u uzajamnoj vezi. To znači da ova dva tela jedno drugome ograničavaju kretanje. U klasičnoj mehanici, kinematički par je veza između dva fizička objekta koja nameće ograničenja na njihovo relativno kretanje (kinematika[1][2]). Nemački inženjer Franc Rolo je predstavio kinematički par kao novi pristup proučavanju mašina[3] koji je omogućio napredak u odnosu na kretanje elemenata koji se sastoje od jednostavnih mašina.[4]
Opis
Kinematika je grana klasične mehanike[5] koja opisuje kretanje tačaka, tela (objekata) i sistema tela (grupa objekata) bez razmatranja uzroka kretanja.[2] Kinematika se kao oblast proučavanja često naziva „geometrija kretanja“.[6] Za više detalja, pogledajte Kinematika.
Hartenberg & Denavit[7] predstavljaju definiciju kinematičkog para:
U pitanju veza između krutih tela, Rulo je prepoznao dve vrste; nazivao ih je višim i nižim parovima (elemenata). Kod viših parova, dva elementa su u kontaktu u tački ili duž linije, kao kod kugličnog ležaja ili diska i pratioca; relativna kretanja podudarnih tačaka su različita. Niži parovi su oni za koje se može vizualno prikazati kontakt u oblasti, kao što je kod spojeva igle, ukrštenih glava,[8][9] kugličnih i utičnih spojeva i nekih drugih; relativno kretanje podudarnih tačaka elemenata, a samim tim i njihovih veza, je slično, a razmena elemenata iz jedne veze u drugu ne menja relativno kretanje delova kao što bi to bilo sa višim parovima.
U kinematici, dva povezana fizička objekta, koja čine kinematički pari, nazivaju se „kruta tela“. U studijama mehanizama, manipulatora ili robota, ova dva objekta se obično nazivaju „veze“.
Mehanički sistem
Mehanički sistem čine tela koja su međusobno povezana vezama koje ograničavaju slobodno kretanje svakog tela u sistemu.[10][11][12] To znači da kretanje jednog tela izaziva kretanje svih ostalih tela u sistemu. Kod robota mehanički sistem ima zadatak da uspostavi prostorne odnose između završnog uređaja (šake, alata …) i radnog predmeta.
Mehanizam
Mehanizam je osnova svake mašine, pa i robota. Mehanizam ima zadatak da jednu vrstu kretanja pretvara u drugu, dok mašina pretvara jedan oblik energije u drugi. Članovi mehanizma su kruta materijalna tela od kojih je sastavljen mehanizam. Vodeće (pogonski) članovi prenose kretanje na ostale članove mehanizma. Svi ostali su vođeni (gonjeni) članovi. Svaki mehanizam se sastoji iz pokretnih članova (segmenata) i nepokretnih članova (postolja). Ako se međusobno povežu dva tela, od kojih je barem jedno pokretno, tad nastaje kinematski par (zglob).
Slobodno telo

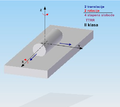
Na početku, posmatramo slobodno telo.[14][15] U Dekartovom pravouglom koordinatnom sistemu ono može da se kreće na šest različitih nezavisnih načina. To su tri translacije duž koordinatnih osa i tri rotacije oko tih osa. To znači da je potrebno 6 nezavisnih veličina (parametara) da bi se jednoznačno odredio položaj slobodnog tela (tri za translatorno i tri za rotaciono kretanje).
Broj stepeni slobode
Broj stepeni slobode (n) je broj mogućih nezavisnih kretanja.[16] To je broj nezavisnih parametara koji su potrebni da bi se jednoznačno odredio položaj tela.[17] Slobodno telo ima šest stepeni slobode, tri za translaciju i tri za rotaciju pa je n=6. Telo u kinematskom paru, usled nametnute veze i ograničenog kretanja, ima manje od šest stepeni slobode.
Klase kinematskih parova
Kinematski parovi se dele u zavisnosti od načina vezivanja i realizacije veza između segmenata. Kinematske parove delimo na klase.
Klasa (k) je broj ukinutih (poništenih) slobodnih kretanja tela usled nametnute veze u kinematskom paru. To znači da klasa predstavlja broj izgubljenih stepeni slobode. Zato se kaže i da je klasa dopuna broja stepeni slobode do 6. Uvek je n+k=6.
Za primjenu u robotici najvažniji su kinematski parovi pete klase. Kinematski par pete klase dozvoljava samo jednu rotaciju (rotacioni par), odnosno samo jednu translaciju (translatorni par), što znači da ima jedan stepen slobode.
Pored parova pete klase, u teoriji robotike koriste se i drugi kinemarski parovi.
Galerija
-
 Slobodno telo
Slobodno telo -
 Kinematski par I klase
Kinematski par I klase -
 Kinematski par II klase
Kinematski par II klase -
 Kinematski par III klase
Kinematski par III klase -
 Kinematski par IV klase
Kinematski par IV klase -
 Kinematski par V klase - rotacioni
Kinematski par V klase - rotacioni -
 Kinematski par V klase - translatorni
Kinematski par V klase - translatorni







Reference
- ^ Joseph Stiles Beggs (1983). Kinematics. Taylor & Francis. стр. 1. ISBN 0-89116-355-7.
- ^ а б Thomas Wallace Wright (1896). Elements of Mechanics Including Kinematics, Kinetics and Statics. E and FN Spon. Chapter 1.
- ^ Reuleaux, F., 1876 The Kinematics of Machinery, (trans. and annotated by A. B. W. Kennedy), reprinted by Dover, New York (1963)
- ^ A. P. Usher, 1929, A History of Mechanical Inventions, Harvard University Press, (reprinted by Dover Publications 1968).
- ^ Ben-Chaim, Michael (2004), Experimental Philosophy and the Birth of Empirical Science: Boyle, Locke and Newton, Aldershot: Ashgate, ISBN 0-7546-4091-4, OCLC 53887772 .
- ^ Russell C. Hibbeler (2009). „Kinematics and kinetics of a particle”. Engineering Mechanics: Dynamics (12th изд.). Prentice Hall. стр. 298. ISBN 978-0-13-607791-6.
- ^ R. S. Hartenberg and J. Denavit (1964) Kinematic synthesis of linkages, pp 17-18, New York: McGraw-Hill.
- ^ „The Two Stroke Crosshead Diesel Engine Crosshead Pin and Slippers”. Marinediesels.info. Архивирано из оригинала 2018-10-14. г. Приступљено 2013-07-22.
- ^ „3.2.2. Piston (reciprocating) compressor”. Drucklufttechnik.de. Приступљено 2013-07-22.
- ^ Merriam-Webster Dictionary Definition of mechanical Архивирано 2011-10-20 на сајту Wayback Machine
- ^ Reuleaux, F., 1876 The Kinematics of Machinery Архивирано 2013-06-02 на сајту Wayback Machine (trans. and annotated by A. B. W. Kennedy), reprinted by Dover, New York (1963)
- ^ J. M. McCarthy and G. S. Soh, 2010, Geometric Design of Linkages, Архивирано 2016-08-19 на сајту Wayback Machine Springer, New York.
- ^ Ellse, Mark; Honeywell, Chris (1997). Mechanics and Electricity.
- ^ Sears; Zemansky; Young (1991). College Physics.
- ^ Martin, J. L. (1996). General Relativity. стр. 3.
- ^ Pennestrı̀, E.; Cavacece, M.; Vita, L. (2005). „On the Computation of Degrees-of-Freedom: A Didactic Perspective”. Volume 6: 5th International Conference on Multibody Systems, Nonlinear Dynamics, and Control, Parts A, B, and C. 2005 ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. California, USA. стр. 1733—1741. ISBN 0-7918-4743-8. doi:10.1115/DETC2005-84109.
- ^ Hale, Layton C. (1999). Principles and techniques for designing precision machines (PDF) (PhD). Massachusetts Institute of Technology.
Literatura
- Veljko Potkonjak “Robotika” Naučna knjiga, Beograd 1989<ref>Potkonjak, Veljko (1989). Robotika. Beograd: Naučna knjiga. стр. 25, 28. ISBN 86-23-42022-5.
- Tugomir Šurina, Mladen Crneković “Industrijski roboti” Školska knjiga, Zagreb 1990
- Šurina, Tugomir; Crneković, Mladen (1990). Industrijski roboti. Zagreb: Školska knjiga. стр. 13. ISBN 86-03-99665-2.
- French, A.P. (1971). Newtonian Mechanics. New York: W. W. Norton & Company. стр. 3. ISBN 978-0-393-09970-6.
- Bettini, Alessandro (2016). A Course in Classical Physics 1—Mechanics. Springer. стр. vii. ISBN 978-3-319-29256-4.
- Feynman, Richard (1996). Six Easy Pieces. Perseus Publishing. ISBN 978-0-201-40825-6.
- Feynman, Richard; Phillips, Richard (1998). Six Easy Pieces. Perseus Publishing. ISBN 978-0-201-32841-7.
- Feynman, Richard (1999). Lectures on Physics. Perseus Publishing. ISBN 978-0-7382-0092-7.
- Landau, L. D.; Lifshitz, E. M. (1972). Mechanics Course of Theoretical Physics , Vol. 1. Franklin Book Company. ISBN 978-0-08-016739-8.
- Eisberg, Robert Martin (1961). Fundamentals of Modern Physics. John Wiley and Sons.
- M. Alonso; J. Finn. Fundamental university physics. Addison-Wesley.
- Gerald Jay Sussman; Wisdom, Jack (2001). Structure and Interpretation of Classical Mechanics. MIT Press. ISBN 978-0-262-19455-6.
- D. Kleppner; R. J. Kolenkow (1973). An Introduction to Mechanics. McGraw-Hill. ISBN 978-0-07-035048-9.
- Goldstein, Herbert; Poole, Charles P.; Safko, John L. (2002). Classical Mechanics (3rd изд.). Addison Wesley. ISBN 978-0-201-65702-9.
- Thornton, Stephen T.; Marion, Jerry B. (2003). Classical Dynamics of Particles and Systems (5th ed.). Brooks Cole. ISBN 978-0-534-40896-1.
- Kibble, Tom W.B.; Berkshire, Frank H. (2004). Classical Mechanics (5th ed.). Imperial College Press. ISBN 978-1-86094-424-6.
- Morin, David (2008). Introduction to Classical Mechanics: With Problems and Solutions (1st изд.). Cambridge, UK: Cambridge University Press. ISBN 978-0-521-87622-3.
- O'Donnell, Peter J. (2015). Essential Dynamics and Relativity. CRC Press. ISBN 978-1-466-58839-4.
- Koetsier, Teun (1994), „§8.3 Kinematics”, Ур.: Grattan-Guinness, Ivor, Companion Encyclopedia of the History and Philosophy of the Mathematical Sciences, 2, Routledge, стр. 994—1001, ISBN 0-415-09239-6
- Moon, Francis C. (2007). The Machines of Leonardo Da Vinci and Franz Reuleaux, Kinematics of Machines from the Renaissance to the 20th Century. Springer. ISBN 978-1-4020-5598-0.
- Eduard Study (1913) D.H. Delphenich translator, "Foundations and goals of analytical kinematics".
- Edmund Taylor Whittaker (1904). A Treatise on the Analytical Dynamics of Particles and Rigid Bodies. Cambridge University Press. Chapter 1. ISBN 0-521-35883-3.
- Russell C. Hibbeler (2009). „Kinematics and kinetics of a particle”. Engineering Mechanics: Dynamics (12th изд.). Prentice Hall. стр. 298. ISBN 978-0-13-607791-6.
- Ahmed A. Shabana (2003). „Reference kinematics”. Dynamics of Multibody Systems (2nd изд.). Cambridge University Press. ISBN 978-0-521-54411-5.
- P. P. Teodorescu (2007). „Kinematics”. Mechanical Systems, Classical Models: Particle Mechanics. Springer. стр. 287. ISBN 978-1-4020-5441-9.
- A. Biewener (2003). Animal Locomotion. Oxford University Press. ISBN 019850022X.
- Ampère, André-Marie (1834). Essai sur la Philosophie des Sciences. Chez Bachelier.
- Merz, John (1903). A History of European Thought in the Nineteenth Century. Blackwood, London. стр. 5.
- O. Bottema & B. Roth (1990). Theoretical Kinematics. Dover Publications. preface, p. 5. ISBN 0-486-66346-9.
Spoljašnje veze
Kinematski par на Викимедијиној остави.
- Physclips: Mechanics with animations and video clips from the University of New South Wales.
- Kinematic Models for Design Digital Library (KMODDL), featuring movies and photos of hundreds of working models of mechanical systems at Cornell University
- e-book library of classic texts on mechanical design and engineering.
- Micro-Inch Positioning with Kinematic Components
| Normativna kontrola: Državne |
|
|---|









